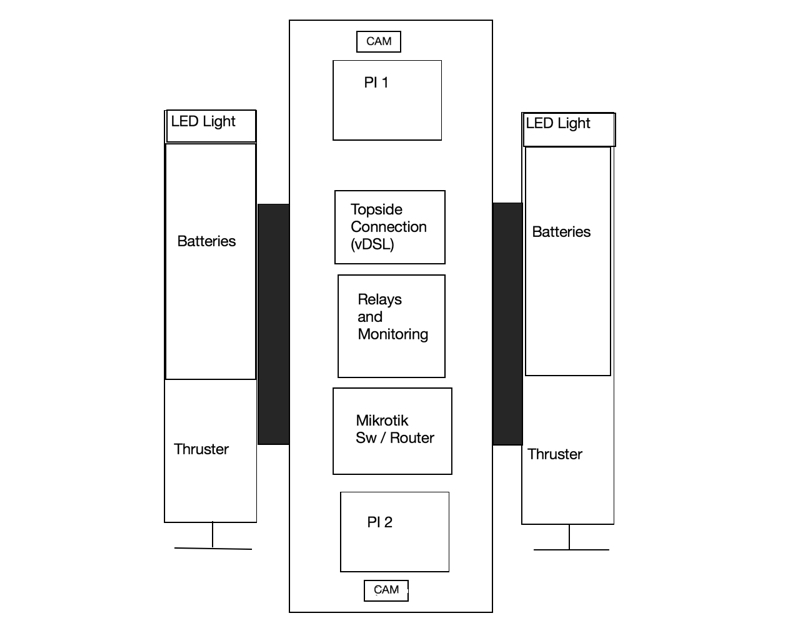
Got the body assembled (somewhat). Visibility in this pic is not good, but I've gotten the batteries installed in the center tube, and those side-tubes will house the LED lighting in the fronts (looking at you) and the motors in the back. STILL not sure how I'll accomplish the up/down motor(s). Think I only need one motor for vertical ascent / descent, but still not sure where to place it. Over on the left there are the endcaps that the motors will be installed in, with the prop headed out of them on the smaller side, with a coller around that as well.
I'm also not convinced that this setup is the one I want long term. I'm pretty sure everyone else in the world comes up with a square ROV for specific reasons. Flotation being one.